















Director of Engineering and Arc Welding
PAW is an arc welding process that uses a non-consumable tungsten or tungsten alloy electrode, much like GTAW.
Plasma arc welding (PAW) often is overlooked when a fusion welding process must be selected for high-integrity applications such as those found in the medical, electronics, aerospace, and automotive industries.
This process has been overlooked because it is more complex and requires more expensive equipment than other arc processes and because welders want increased welding speeds such as those found with laser beam welding (LBW). However, automotive manufacturers have turned to PAW for a number of applications, including body panels and exhaust system components.
Gas tungsten arc welding (GTAW), also known as tungsten inert gas (TIG) welding, is commonly used for high-quality welds at slower speeds, while LBW is often selected for higher-speed welding.
PAW sometimes offers greater welding speed than GTAW at lower cost than LBW, and it may be the most effective process for many applications. These include welding stainless steel expandable bellows, where PAW is more tolerant to joint misalignment than LBW and gives better penetration than GTAW; welding coated steels like those used in automotive exhaust systems; and welding in keyhole mode to make full-penetration welds in relatively thick material in a single pass.
PAW is an arc welding process that uses a non-consumable tungsten or tungsten alloy electrode, much like GTAW.
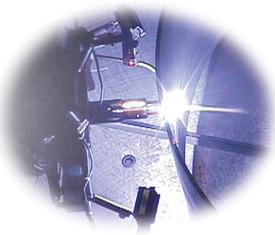
The primary difference between these two welding processes is that in PAW, the electrode is recessed in a nozzle that serves to constrict the arc. Plasma gas is ionized in the constricting nozzle and exits the nozzle at high speed.
The plasma gas alone is not adequate to shield the molten weld pool from the atmosphere, so shielding gas is supplied around the plasma column, as with GTAW. The flow rate for the plasma gas is much lower than that of the shielding gas to minimize turbulenc
The conical shape of a gas tungsten arc requires that arc length control (ALC) or arc voltage control (AVC) equipment be used for automated welding to ensure consistent spot size and energy density.
The constricted arc in PAW results in a much more columnar-shaped arc. This minimizes the effect of arc length variation on energy density and minimizes the need for ALC or AVC.
Another advantage of recessing the electrode in a nozzle is that electrode contamination is minimized. An electrode can usually last for an entire production shift without needing to be reground.
Another unique feature of PAW is how the arc is initiated. High-frequency (HF) current typically is used to establish a pilot arc between the electrode and the copper nozzle. HF is turned off after the pilot arc is started. The pilot arc current usually is fixed at one level or can be set at one of two levels, typically somewhere between 2 and 15 amps.
For welding, the arc is transferred to the work, which becomes part of the electrical circuit. Because the arc is established prior to making a weld, welding arc starts tend to be very reliable.
The pilot arc remains on after welding is completed, and the torch is ready to make the next weld without needing additional HF. This can be beneficial when welding in automated applications in which electromagnetic noise from HF can interfere with computerized process controllers. One side effect of the pilot arc is that plasma torches must be water-cooled, even for low-current applications.
There are three different operating modes for PAW that are determined by the welding current level. Microplasma welding current ranges from less than 0.1 amp to about 20 amps.
Medium-current plasma welding or melt-in-mode current typically ranges from 20 to 100 amps. High plasma welding current is greater than 100 amps and typically is done in keyhole mode, similar to LBW or electron beam welding (EBW).
The combination of high current and plasma gas flow creates a hole in the material, and molten metal flows behind the moving hole to create the weld bead. When welding in keyhole mode, the plasma gas flow rate must be controlled carefully to make a weld. A slightly higher flow rate will blow the molten metal away and result in cutting.
While PAW is not as fast as LBW (depending on the application and laser source, LBW may be five times faster than PAW) or EBW, the capital equipment costs for PAW are typically a small fraction of the cost of the high-energy density equipment.
One disadvantage of PAW is its greater heat input, which produces wider welds and heat-affected zones than LBW and EBW. This may result in more distortion and loss of mechanical properties.
However, PAW offers an advantage over these processes in tolerance to joint gaps and misalignment. Although the arc is constricted, the plasma column has a significantly larger diameter than the beams. Adding filler metal also is accomplished more easily with PAW than with LBW or EBW.
The main disadvantages of PAW compared to GTAW are that the equipment is more complex and costly, and the need for water cooling of the torch limits how small the torch can be made (GTAW torches may be gas-cooled and can be made to fit into smaller areas). Also, the narrow PAW arc is less tolerant to joint misalignment than the conical gas tungsten arc.
Microplasma offers an advantage over GTAW because a stable arc can be maintained at lower current levels. This was a driving force in the development of this process.
In the early 1960s, it was difficult to get a stable gas tungsten arc at much less than 15 amps. Microplasma proved capable of overcoming this limitation. GTAW has evolved considerably since then with claims of stable arcs at less than 1 amp.
But PAW has a lower current limit of roughly one-tenth that of GTAW. The low current capability, along with reliable arc starting, makes PAW suitable for many small precision welding applications, especially in the medical and electronics industries.
GTAW and LBW also are used in medical and electronics industries. GTAW is used for lower-volume applications because of the low cost of equipment and relative simplicity. LBW is used when higher-volume production can justify the expense, when heat input must be minimized, and when joint fit-up can be tightly controlled.
Using PAW in the medium current range in melt-in mode is similar to using GTAW, but the arc tends to be stiffer and less affected by changes in arc length with PAW.
This allows for longer arc lengths to be used, and that combined with the recessed electrode can make it easier to add filler metal when welding manually. Electrode contamination by the filler metal rarely occurs with PAW.
Melt-in mode PAW can be beneficial compared to GTAW in automated applications because of more reliable arc starts, longer electrode life, no need for AVC or ALC, and no electromagnetic noise from HF at the start of each weld.
PAW offers a significant advantage over GTAW in many applications that require high current. Making welds with PAW in keyhole mode can result in full-penetration welds in relatively thick materials in a single pass.
Compared to welding thicker sections with GTAW, keyhole PAW minimizes the need for costly joint preparation and reduces or eliminates the need for filler metal.
The high depth-to-width ratio of a keyhole plasma weld compared to a GTA weld also can greatly reduce angular distortion. This technique is best applied using automated equipment. The keyhole can be difficult to maintain during manual welding.
Most materials can be welded with PAW using direct current electrode negative (DCEN). DC welding current also can be pulsed to control penetration with both melt-in mode and keyhole mode.
Variable polarity plasma arc (VPPA) welding power sources enhance the joining of materials such as aluminum and magnesium. The VPPA square waveform can be tailored so that the electrode-positive portion of each cycle that cleans tenacious surface oxides can be balanced with the electrode-negative portion that provides more penetration.
PAW also may be combined with GTAW in various ways for automated welding to optimize welding speed and weld quality.
One example of this is a research project for tube welding that was performed at the Edison Welding Institute (EWI) using three torches to make a single-pass weld.
The lead GTAW torch was used for preheating and edge preparation. A second PAW torch was operated in keyhole mode to provide full penetration. A GTAW torch was used as the trailing torch to smooth and shape the weld bead.
The material welded was 0.315-inch (8-millimeter) 304 stainless steel plate with sheared edges. Material of this thickness could not be welded with conventional GTAW in a single pass without edge preparation no matter how many torches were used.
Acceptable results were obtained using GTAW/PAW/GTAW without adding filler metal, but more consistent results were obtained when filler metal was added to the weld pool of the trailing torch. Wire feed speed was adjusted to control fill to get flush or slightly convex weld profiles.
To get the full benefit of PAW, robust welding procedures must be established, such as defining operating windows for welding parameters.

The Welder, formerly known as Practical Welding Today, is a showcase of the real people who make the products we use and work with every day. This magazine has served the welding community in North America well for more than 20 years.
start your free subscription
Easily access valuable industry resources now with full access to the digital edition of The Fabricator.

Easily access valuable industry resources now with full access to the digital edition of The Welder.

Easily access valuable industry resources now with full access to the digital edition of The Tube and Pipe Journal.

Easily access valuable industry resources now with full access to the digital edition of The Fabricator en Español.
In this podcast episode, Brian Steel, CEO of Cadrex Manufacturing, discusses the challenges of acquiring, merging, and integrating...





