















Applications Engineer and Off-line Programming Specialist

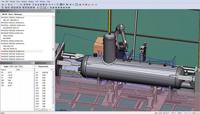
Using real-world points, the software is able to reconcile differences between the computer-generated cell and the real-world cell, helping to improve programming accuracy.
As you look for new ways to compete globally, it’s important that you take a holistic look at your manufacturing process. That parts—and money—are not made when equipment sits idle is a universal truth we can all agree on. While robotic welding cells have helped manufacturers improve productivity, even the latest and greatest robots are idle during the programming process. Programming robots—the practice of teaching a robot its various points, trajectories, and joints on a workpiece— can take days or weeks, depending on the size and scope of the workpiece and cell.
Offline programming and simulation technology can help fabricators of all sizes to program parts quickly and more consistently, become more competitive through improved and accurate costing, and provide operational flexibility.
Offline programming and simulation software allows you to program your robot from a computer rather than on the robot itself. To work with this type of software, you need 3-D CAD models of both your parts and fixtures that will be used in the cell (created in a program such as SolidWorks®). From there your software options will vary depending on the brand of the robots in your robotic welding cells.
For instance, most robot OEMs offer in-house-developed offline programming software with proprietary 3-D CAD models of their robots. If you have a multibrand robotic fleet, you may need a software program that offers 3-D CAD models from numerous manufacturers. It is crucial to note that the in-house robot software programs tend to be customized with more brand-specific functionality and finer control over the programming.
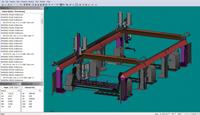
Once you import the 3-D CAD models of your parts and tooling/fixtures, the software then matches that with the 3-D CAD model of the robot, creating a virtual replica of the system on the shop floor. With the click and drag of a mouse, you can then begin to build the program on your PC instead of using a teaching pendant in the weld cell.
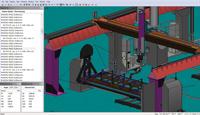
After completing all of the weld sequences, the system allows you to run the welding program as a simulation, in which the software detects possible collisions, identifies areas where weld procedure angles could be difficult to achieve, and provides the time it will take for the cell to make a complete part. After simulation and testing, you export the program from the computer to the robot via Ethernet.
Touching up your program manually with a teaching pendant in the cell is the next step, as the software typically gets the robot to within a quarter of an inch of its final path. In the not-too-distant future, however, automating fine-tuning through external sensing technology on the end of the robot will become a reality.
Even with the manual touchup, off-line programming and simulation software drastically reduce the time it takes to create programs. While each application is different, it is not unheard of to program a part in one-quarter of the time it previously took to program the robot at the cell. Considering that heavy equipment manufacturers sometimes spend weeks programming large weldments, the time savings add up. Yet the greatest benefit is that the majority of programming occurs while the cell is still welding other parts, maximizing uptime.
Having the ability to verify the type of fixtures you need to build in a 3-D scenario is a major advantage of this type of software. Designers hope to get the tooling right the first time, but any number of variables can change during the planning stages, requiring the tooling to be reworked. Software allows you to review the workspace, ensuring the robots can actually reach each point without interference.
Before testing the robot in the real world, which requires time and money to set up, you can verify the program electronically to make sure you have the proper equipment to accomplish its intended goals. Most software presents actual robot kinematics—the trajectory between each point—which allows the tooling/fixture architect to guarantee that the design will maintain the required tolerances while also accommodating the welding system.
Offline programming helps to keep robots working, not sitting idle while they’re being programmed.
The virtual world is perfect. On a computer, a right angle is precisely 90 degrees, and 1,000 millimeters is exactly 1,000 millimeters. No more, no less. The real world, on the other hand, is entirely imperfect. So, how do you translate the slight inaccuracies of a real weld cell into a computer-generated program?
Through mastering and calibration tools in the software, you can teach the robot a small number of real points in the physical system, incorporate that into the computer program, and ultimately achieve greater accuracy than if you relied on the “perfect” world of the computer.
For instance, simply teach the real robot system a few key points, such as the location of the worktable, where one rotational axis is located, and the starting point of a weld. Import those points into the program, and the software will reconcile any differences between the real world and the virtual world. This reconciliation is performed only once per system and typically achieves total program accuracy to within a quarter of an inch. This acquired level of accuracy requires considerably less touchup time once the final program has been downloaded to the robot.
One of the most efficient features of this technology is the copy/paste/mirror function, which is extremely useful for manufacturers that weld many of the same or similar parts on a single fixture. If you have two identical parts next to each other, there is a simple way for the software to copy/paste the first part’s program over to the second part’s.
If the two parts exist on the same fixture, but as reflective opposites of each other, the software mirrors the first part’s program directly onto the second. This simplifies programming and is substantially easier than manually teaching each individual part in the cell. Even if parts have similar yet not identical features, the software facilitates growing or moving taught paths. As with constructing a real-life assembly component, the robot program creates a series of shorter sections that were copied/pasted/shrunk/moved to create the whole.
An extreme example of time savings is welding 24 iterations of the same part. From the original program for one part, the rough program for all 24 pieces can be finished in about two hours. Manually teaching each individual iteration may take days, perhaps weeks.
Low-volume, High-mix Shops. Software allows fab shops with low volumes of differing parts to constantly program new parts with minimal downtime. It also acts as a quoting tool, letting you determine if a job is suitable for your robotic system and if you possess the proper tooling/fixtures. The simulation also helps you determine cycle times and wire consumption for more accurate quoting.
Big Parts With Many Welds. Especially suitable for heavy equipment manufacturers and others who weld extremely large components with many welds, offline programming is infinitely faster than jogging a robot around the part in a weld cell and trying to gain access to every joint. The software can trim weeks off the programming and implementation times.
Short Start-up Times. Say you have a new robotic system that took months to build and you want to be up and running as soon as the system is complete. The cell has two robots that move along a gantry-style structure to weld an extremely large part. Offline, you can program the robots while the cell is being constructed and, upon completion, drop in the programs, touch them up, and begin welding. Manually programming these parts would have required you to spend extensive time in and out of a hoist to access each weld. The software can cut what could have been four weeks of programming down to one, allowing you to perform the bulk of it from the comfort of your office.
Value-added manufacturing and diversification. If you’re a manufacturer who makes millions of one part and very little else, or if you make many similar parts with very few welds, offline programming software is probably not worth your investment. However, if you are thinking about diversifying your offerings, cookie-cutter parts are now becoming customizable as a value-added enticement for the customer and require the manufacturer to be more flexible in its programming. As this type of manufacturer continues to diversify, this software will become more appropriate.
Offline programming and simulation software are tools that help you program robots faster, reduce robotic cell downtime, and quote new jobs more accurately. As more and more companies turn to robotics to stay competitive amid a skilled-labor shortage and aggressive bidding from other manufacturers, this software is another important tool that keeps them a step ahead of the competition.
The Welder, formerly known as Practical Welding Today, is a showcase of the real people who make the products we use and work with every day. This magazine has served the welding community in North America well for more than 20 years.
start your free subscription
Easily access valuable industry resources now with full access to the digital edition of The Fabricator.

Easily access valuable industry resources now with full access to the digital edition of The Welder.

Easily access valuable industry resources now with full access to the digital edition of The Tube and Pipe Journal.

Easily access valuable industry resources now with full access to the digital edition of The Fabricator en Español.
In this episode of The Fabricator Podcast, Caleb Chamberlain, co-founder and CEO of OSH Cut, discusses his company’s...






{kind=link}