















Don't be marginalized
How peripherals can maximize your robotic welding performance
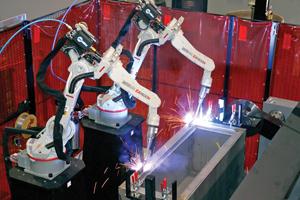
Robotic welding systems introduce speed, accuracy, and repeatability into the fabrication process. The repeatability of these systems can increase productivity and reduce welding production costs, thereby maximizing the return on the investment in automation. When compared to semiautomatic welding operations, a robot has the ability to perform the same or more tasks with extreme precision and a lower labor cost per part.
Still, achieving these results isn't subject to chance. It's the result of careful equipment purchases, software programming, and operator training. In many cases, it can also be the result of complementary equipment called peripherals. Peripherals are devices integrated into the robotic welding process that are intended to maximize its effectiveness and protect the overall equipment investment. In short, these devices usually can add significantly to the ROI a company achieves with its welding robot. The key to successful peripheral selection and usage, like that of any other equipment, is simply a matter of education.
Get a Grip
All robotic welding systems require some form of collision detection to reduce the damage to both the robot and the welding system in the event of an impact, which can occur for several reasons: A robotic gun collides with an incorrectly positioned workpiece or tooling that has been left out of position, or the gun strikes an item that has inadvertently been left in the weld cell.
As protection against such impacts, many welding robots use a shock sensor or safety clutch. In cases where collision detection is integral to the robot, a solid mounting arm can be used.
The sensitivity of a clutch or shock sensor can be calibrated to accommodate the robotic gas metal arc welding (GMAW) gun's mass and moment of inertia. The function of a clutch is both mechanical and electrical. The clutch first recognizes the physical impact of the gun on a solid surface, which sends an electrical signal back to the robot controller, causing the system to stop. This action prevents damage to the robot and the robotic gun. It also alerts the welding operator that a variable is incorrect in the weld cell.
Some robotic systems can monitor current rates or torque via robot collision detection software that stops the robot in the event of an impact. In this situation, a solid arm mount would be used in lieu of a clutch. As its name implies, a solid arm mount is just that: solid. It does not provide electrical feedback during an impact, but rather relies on the software to stop the robot.
Both clutches and solid arm mounts require mounting arms that attach them to the robotic gun. A mounting arm is generally made of a durable aluminum alloy that resists breakage during an impact. Its purpose is to hold the robotic GMAW gun in a specified position (even after a welding operator replaces the gun), so the robot can repeat the same weld throughout the welding process.
Clutches and solid arm mounts also are quite robust and require little to no maintenance to keep them operating at their best. However, if maintenance or repairs are necessary for one of these peripherals, maintenance personnel should contact their welding distributor, integrator, or robotic equipment manufacturer for advice.
Making the Cut
If a robotic welding application requires consistent welding wire stick-out (the distance the wire extends from the end of the contact tip) when the arc initiates, a wire cutter is recommended. Note that consistent welding wire stick-out is not required for all applications.
Again, as its name implies, a wire cutter cuts the welding wire to a specified length or stick-out, and it also removes any balling at the end of the wire. In doing so, this peripheral helps provide smooth arc starts. It also helps attain reliable, repeatable welds, as many companies that own automated systems program the robot to seam-track, or find the joint, with touch sensing. This touch sensing depends on the robotic GMAW gun having a consistent length of wire with which to locate the correct spot and begin welding.

Clutches offer protection in the event of an impact by signaling to the robot to stop welding.
Most wire cutters are designed to cut different types of welding wire, including stainless steel, flux-cored, and metal-cored, usually up to 1/16 inch in diameter. Often they are mounted on a nozzle-cleaning station or remotely located for use as needed.
Inspected and Ready to Weld
Another key peripheral is a neck (or gooseneck) inspection fixture. A neck inspection fixture tests the tolerance of a robotic GMAW gun's neck to the tool-center point so it can be adjusted after an impact or after bending resulting from routine welding. Most inspection fixtures accommodate standard necks for that particular brand of robotic gun. They are designed with a precision-tooled steel base to withstand the harsh robotic welding environment and also to guarantee accuracy after long-term use.
The advantage of adding a neck inspection fixture to a robotic weld cell is twofold. One, it ensures that the neck meets the specifications to which the robotic welding system has been programmed. After the tolerance is determined, a trained welding operator simply adjusts the neck accordingly. This adjustment helps prevent costly rework caused by missing weld joints. Accurate neck adjustments also prevent the downtime necessary to reprogram the robot to meet the welding specifications with the existing bent neck.
Two, a neck inspection fixture can save time, money, and confusion when exchanging necks from one robotic GMAW gun to another. This is especially advantageous if a company maintains a large number of welding robots. Welding operators can simply remove a bent neck and replace it with a spare that has already been inspected and adjusted, and then put the robot back in service immediately. The damaged neck can then be set aside for inspection while the robot is still online. This, again, reduces downtime and also helps save money for extra parts.
Cleaned, Sprayed, and Spatter-Free
One of the most important peripherals a company should consider for its robotic welding system is a nozzle-cleaning station, also called a reamer. This peripheral can be used by itself or in conjunction with a sprayer that applies antispatter compound.
A nozzle-cleaning station cleans the robotic gun nozzle of spatter and clears away debris in the diffuser that accumulates during the welding process. If a sprayer has been mounted on the nozzle-cleaning station, it will apply a water- or oil-based antispatter compound to protect the nozzle, diffuser, and workpiece from spatter after it has been cleaned.
A nozzle-cleaning station has several benefits for the robotic welding process. First, by minimizing the accumulation of spatter and debris in the nozzle, it helps lengthen the life of the robotic gun consumables (nozzle, contact tip, and diffuser) and of the robotic gun itself. This longer equipment life translates into less downtime and labor for component changeover and also less cost for equipment. A clean nozzle also produces better welds and reduces problems that could lead to rework.
To achieve all of these benefits, it's important to consider two factors: the location of the nozzle-cleaning station and the timing of its use. Ideally, the nozzle-cleaning station should be placed close to the welding robot so that it is easily accessible when cleaning is necessary. As well, the nozzle-cleaning process should be programmed so that the function occurs in between cycles—during part loading or tooling transfer. In this case, the cleaning time would not be added to the overall cycle time per part, because a typical nozzle-cleaning station needs only three or four seconds to complete the job.
If a sprayer is attached to a nozzle-cleaning station, be certain to use only the minimum amount of antispatter compound required for the application. Excessive antispatter usage can lead to unnecessary costs, and the compound may build up on the nozzle, the welding robot, and the parts being welded. In the long term, a high spray volume could cause additional problems that are just as bad as spatter buildup.
Finally, implementing a preventive maintenance plan for a nozzle-cleaning station is imperative to gaining long-lasting results from the equipment. And it's easy. Simply clean off the peripheral, wiping it free of dirt, debris, and spatter, on a weekly basis to prevent malfunctions and, in turn, quality problems in the robotic weld cell.

A nozzle-cleaning station can lengthen the life of the robotic GMAW gun and its consumables, as well as save money for extra parts.
No Peripheral Decision
The decision for a company, large or small, to invest in robotic welding equipment is significant. It requires time, knowledge, and a trusted relationship with a robotic welding equipment manufacturer or integrator to find the right system for the application. The same holds true for peripherals.
And although these devices do add to the initial cost of automating, they can lead to measurable cost savings and profits in the long term. Remember, the goal in robotic welding is repeatability and increased productivity, and additional equipment that can help achieve these goals is worth the consideration.
About the Author
About the Publication
subscribe now
The Welder, formerly known as Practical Welding Today, is a showcase of the real people who make the products we use and work with every day. This magazine has served the welding community in North America well for more than 20 years.
start your free subscription- Stay connected from anywhere

Easily access valuable industry resources now with full access to the digital edition of The Fabricator.

Easily access valuable industry resources now with full access to the digital edition of The Welder.

Easily access valuable industry resources now with full access to the digital edition of The Tube and Pipe Journal.

Easily access valuable industry resources now with full access to the digital edition of The Fabricator en Español.
- Podcasting

In this episode of The Fabricator Podcast, Caleb Chamberlain, co-founder and CEO of OSH Cut, discusses his company’s...
- Trending Articles
1
Sheffield Forgemasters makes global leap in welding technology

2
Welding student from Utah to represent the U.S. at WorldSkills 2024

3
Lincoln Electric announces executive appointments

4
Engine-driven welding machines include integrated air compressors

5
ESAB unveils Texas facility renovation
