














Robotic gripper has a light enough touch to pick up egg yolks
The design of this robotic gripper involves folding a 2D material into a 3D shape.
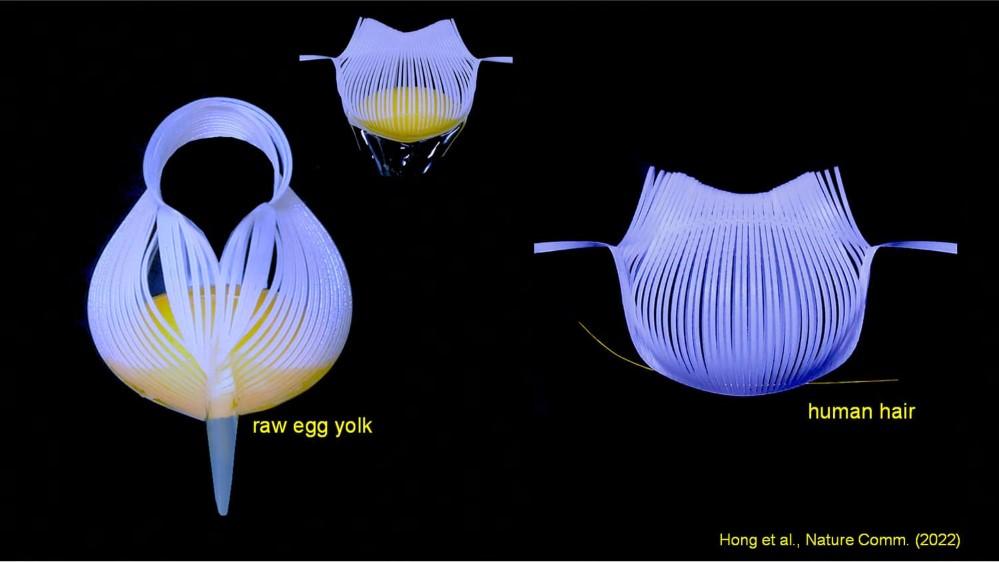
Engineering researchers at North Carolina State University have demonstrated a new type of flexible, robotic gripper with a sufficiently delicate touch to lift an egg yolk without breaking it and grasp a human hair.
According to an article written by Matt Shipman that was posted to the university’s website, the gripper’s design borrows from the Japanese art of kirigami. Similar to origami, in which 2D sheets of material are folded to form 3D shapes, kirigami involves cutting and folding material to form 3D shapes.
An associate professor of mechanical and aerospace engineering at N.C. State, Jie Yin, who is also an author of a paper on the grippers, said, “Conventional grippers grasp an object firmly … by putting pressure on them. That can pose problems when attempting to grip fragile objects, such as egg yolks. But our grippers essentially surround an object and then lift it—similar to the way we cup our hands around an object. This allows us to ‘grip’ and move even delicate objects without sacrificing precision.”
Yaoye Hong, a PhD student at N.C. State and the first author of the paper on the research said, “We have defined and demonstrated a model that allows users to work backwards. If users know what sort of curved 3D structure they need, they can use our approach to determine the boundary shape and pattern of slits they need to use in the 2D material. Additional control of the final structure is made possible by controlling the direction in which the material is pushed or pulled.”
The paper, “Boundary Curvature Guided Programmable Shape-Morphing Kirigami Sheets,” was published in the journal Nature Communications.
- Podcasting

Seth Feldman of Iowa-based Wertzbaugher Services joins The Fabricator Podcast to offer his take as a Gen Zer...
- Trending Articles