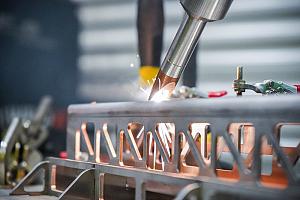
La soldadura robótica puede ser un proceso complejo, especialmente si es un nuevo programador de robots.
ipopba/
iStock/Getty Images Plus
Cuando se hace correctamente, la soldadura robótica puede aportarles a los fabricantes ganancias significativas en productividad, así como un excelente retorno de la inversión (ROI, por sus siglas en inglés). Sin embargo, la soldadura robótica puede ser un proceso complejo, especialmente si usted es nuevo en la programación robótica.
Aun cuando el mejor camino a seguir para aprender programación robótica sea adquirir capacitación del OEM de su robot, no está de más implementar desde el principio consejos y trucos de soldadura robótica probados por expertos. Como con cualquier proceso de especialidad, hay pasos que debe seguir al programar una secuencia de soldadura y ciertas cosas que debe evitar.
Directrices generales para la programación de soldadura robótica
El proceso de soldadura por arco con electrodo metálico protegida por gas (GMAW, por sus siglas en inglés) es el mismo para soldadura robótica y para soldadura semiautomática. Algunas de las prácticas descritas en los códigos de soldadura pueden ayudar a “controlar” la aplicación de robots para el mundo de la fabricación y la manufactura. Los ejemplos incluyen la configuración y uso de procedimientos de soldadura establecidos para diversas condiciones de unión comunes en sus operaciones. Otros consejos relacionados con la soldadura pueden ayudar a simplificar el proceso.
Qué hacer
Cree una biblioteca de archivos de arco con base en el tamaño de la soldadura, y nombre a cada archivo de manera clara y concisa. Por ejemplo, ASF#1 es un filete horizontal de 3/16 de pulgada; ASF#2 es un filete plano de 3/16 de pulgada; ASF#3 es un filete horizontal de ¼ de pulgada; y así sucesivamente. Use números correspondientes para archivos de inicio y fin de arco.
Los archivos de soldadura en zig-zag deben concordar con los archivos de arco para cada tamaño de soldadura. Por ejemplo, ASF#1 usa WEV#1; ASF#2 usa WEV#2, etc.
Quite etiquetas de velocidad en movimientos de proceso si desea usar la velocidad de soldadura especificada en el archivo de inicio de arco.
Mantenga los programas de soldadura pequeños (menos de 100 a 200 puntos). Tener demasiado en un programa puede hacer que la edición sea confusa. Etiquete siempre cada soldadura con un comentario en línea en el movimiento antes del inicio del arco. Use subrutinas lógicas para mantener manejable el tamaño del programa, como por ejemplo un programa para cada orientación de posicionador si hay muchas ubicaciones de soldadura en una parte con muchos lados.
Enfóquese en la postura de la antorcha/brazo para uniones de soldadura, y luego agregue movimientos de corte con aire entre soldaduras que fluyan suavemente.
Conserve una parte maestra para programación. Esta parte debe etiquetarse con números de soldadura y números de archivo de tamaño de arco, lo cual permite una referencia rápida para ajuste de la soldadura. Una impresión de la parte con ubicaciones de soldadura y puntos de programa anotados puede servir para el mismo propósito.
Mantenga una bitácora o registro de cambios para la celda de trabajo robótica donde los técnicos puedan anotar la fecha, hora y razón de los cambios. Los robots puede que tengan la capacidad de registrar cambios a los programas, pero puede que no incluyan la razón de los cambios.
Qué no hacer
No cree programas con ejes de control incorrectos, especialmente si el sistema está equipado con posicionadores coordinados o robots múltiples.
No cree ni use ajustes de soldadura múltiples (velocidad de alimentación de alambre y voltaje) en muchas ubicaciones diferentes de soldadura con el mismo tipo de unión. Use la velocidad de viaje para ajustar el calor o el relleno para diversos empates de unión. La velocidad de alimentación del alambre y el voltaje controlan la “quemadura” del alambre y pueden ajustarse para reducir la salpicadura. La velocidad de viaje tiene el efecto más pronunciado sobre el calor, como lo indica la entrada de calor:
Entrada de calor = (Amps x Volts) / Velocidad de viaje
Directrices de la antorcha de soldadura
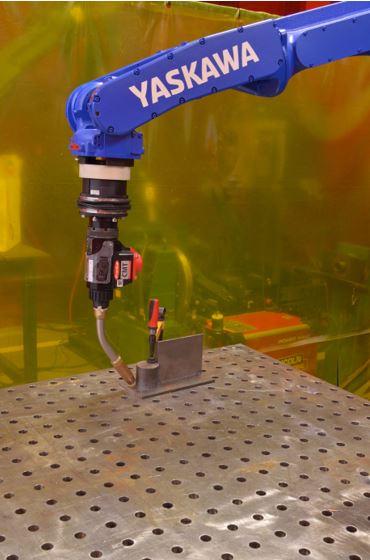
Un factor crítico para la soldadura robótica es elegir la pistola de soldadura correcta para la tarea en cuestión. Además, es de igual importancia la capacidad de programar y maniobrar una antorcha de soldadura con la máxima eficiencia. He aquí algunos consejos que se deben tener en mente para la parte comercial del robot.
Qué hacer
Use una herramienta de alineación de antorcha. La mayoría de los fabricantes las venden y la mayoría funcionarán para diversos modelos de antorcha. La razón es que una antorcha a 45 grados de un fabricante no siempre es lo mismo que una antorcha a 45 grados en una celda robótica. Antes de hacer cualquier programación, ponga la antorcha en la herramienta y asegúrese de que el doblez sea correcto. Si no lo es, use la herramienta para poner el doblez en línea, lo que garantiza un ángulo correcto en la antorcha. Además, si llega a tener que reemplazar la antorcha, puede poner la nueva antorcha en la herramienta de alineación antes de instalarla.
Cree y mantenga un buen punto central de herramienta (TCP, por sus siglas en inglés), así como un trabajo de verificación, el cual confirme la ubicación del TCP y la alineación antes de manipular puntos. Los proveedores de robots y los integradores puede que tengan calibradores o herramientas para ayudar a automatizar este proceso.
Si está buscando uniones de soldadura, vaya a su rutina de búsqueda y cambie a “on” antes de manipular puntos. Si no hace esto perderá la relación entre sus búsquedas y sus puntos de soldadura.
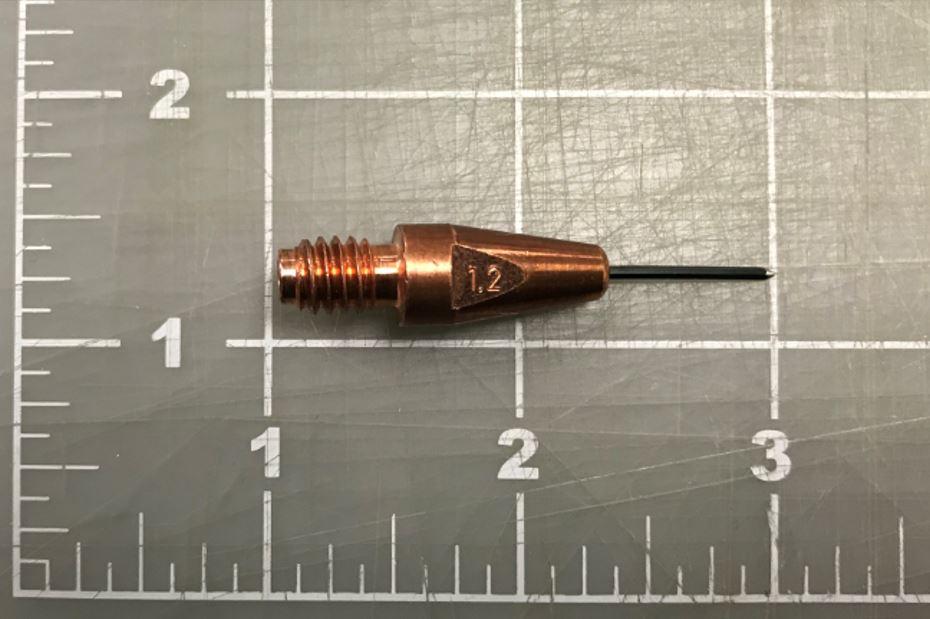
Programe todos los puntos de soldadura con la misma longitud de extensión del alambre (la distancia entre la punta de contacto y la unión de soldadura). Puede crear una “punta de enseñanza” removiendo una punta de contacto e insertando un barreno o broca de tungsteno con la extensión deseada. La punta de enseñanza será recta y puede ayudar a contrarrestar los efectos de la fundición de alambre en la ubicación del TCP. Si está usando el alambre de soldadura real, asegúrese de sujetar el alambre a la misma longitud al programar ya sea con herramienta Welper o con un calibrador.
Qué no hacer
Nunca manipule una posición por un defecto en una parte. Asegúrese de que no haya defecto en la parte o proceso corriente arriba. Usted no busca cambiar un punto para ajustar una parte fuera de especificación, pues las partes dentro de especificación no se soldarán correctamente después del cambio.
No seleccione su antorcha robótica con base en los consumibles que hay en su cuarto de herramientas. Aun cuando sea conveniente tener las mismas partes en una planta, muchos siguen usando ángulos de cuello de antorcha diferentes o diseños caducos debido a que el mantenimiento conserva las mismas listas de partes de repuesto.
No use cuellos de antorcha extendidos ni boquillas angostas a menos que sea absolutamente necesario. Los cuellos extendidos darán como resultado menos repetibilidad y son más propensos a daño. Los diámetros menores de boquilla se taparán con salpicadura con más frecuencia y requerirán más escariado.
Consideraciones de la fuente de poder
Los avances en la tecnología de inversor y procesadores más rápidos han llevado a un control del proceso de soldadura más preciso, lo cual ha beneficiado a la soldadura robótica. Las marcas de fuentes de poder ofrecen tecnologías únicas con interfaces poderosas y a la vez fáciles de usar, que ayudan a obtener soldaduras de alta calidad.
La mayoría de los fabricantes ofrecen múltiples variaciones de proceso para un tipo de alambre, tamaño y combinación de gas dados. Éstos generalmente pueden ser cambiados por el programa de robot para brindar características de soldadura óptimas para una variedad de condiciones de unión, incluso si éstas existen en la misma parte. Algunas de las condiciones adicionales son:
Qué hacer
Dele seguimiento al proceso de soldadura seleccionado desde la fuente de poder además de los ajustes individuales de soldadura, como por ejemplo velocidad de alimentación del alambre y voltaje. Esto puede ser un comentario en el programa de soldadura si no está asociado con las instrucciones para los ajustes de soldadura.
Configure o programe los procesos de soldadura aplicables a su operación en los programas de la fuente de poder o en las tablas de selección de robot. Aun cuando no se usen en una parte específica hoy, estarán en una ubicación de programa conocida para uso futuro.
Qué no hacer
No haga cambios localmente desde el panel de una fuente de poder si está dejando que el robot controle la secuencia. Un proceso o parámetro puede cambiarse en la fuente de poder de manera temporal o por conveniencia, pero los programas más antiguos pueden hacer referencia a este valor cambiado con resultados imprevistos.
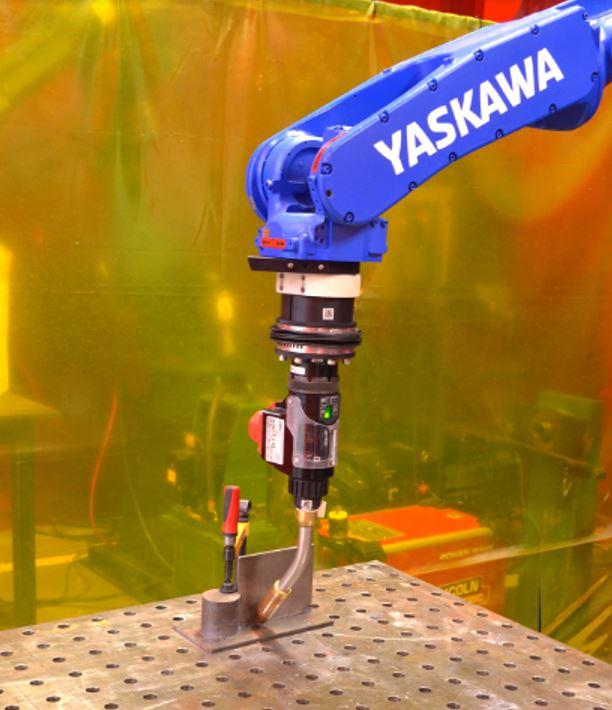
Consideraciones de los robots
Aun cuando puede que usted esté familiarizado con lo importante que es usar los ángulos de antorcha correctos en la soldadura, la programación de robots agrega la variable de crear el movimiento de la manera más eficiente y rápida. Un buen programa de robot evitará que el robot ejecute posiciones/posturas exageradas y equilibrará el movimiento de la orientación de la antorcha con la posición del brazo de robot.
Qué hacer
Todos los movimientos ajenos al proceso deben ser movimientos de unión (movimiento no interpolado). Los movimientos donde un eje se mueve más de 180 grados deben hacerse en dos movimientos para asegurar un movimiento suave.
Mantenga la postura del robot lo más cerca posible de la posición inicial. Trate de mantener la postura por omisión y no ponga al robot en una postura extraña si no es absolutamente necesario.
Mantenga la muñeca—de manera más específica, el eje 5—apuntando hacia abajo para que el ángulo de la antorcha cree el ángulo de trabajo con la unión de soldadura (si la unión es horizontal).
Que no hacer
No use el movimiento de los ejes principales (como por ejemplo el eje 1, 2 y 3) para posicionar el ángulo de la antorcha. El movimiento más eficiente usará el eje de muñeca para orientar la antorcha, mientras que el movimiento del eje de base hace sólo el movimiento de traslación.
No use movimiento excesivo de la antorcha que genere una singularidad de cualquier eje (eje 4 y 5, principalmente) durante el proceso de soldadura.
Implementar soldadura robótica no es una tarea que se deba tomar a la ligera. Cada paso que lleve a cabo para programar un proceso más fluido, más efectivo, puede optimizar la producción. Esto es así sobre todo cuando personal diverso da mantenimiento a diversas celdas robóticas.
Usted puede experimentar muchos beneficios al usar soldadura robótica, desde una mejor calidad de la soldadura hasta una consistencia mejorada. Usar estos consejos y trucos debe ayudarle a alcanzar sus metas de manera más eficiente.
FMA Communications ha introducido al mercado la edición en Español de la revista The Fabricator. Esta versión consiste del mismo tipo de artículos técnicos y sección de lanzamientos de nuevos productos que actualmente presentan el personal de primera categoría de Fabricator en Inglés.
























{kind=link}
{kind=link}
{kind=link}