















Robot-tended spindle-blast machine introduced
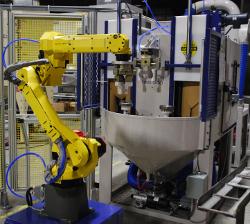
Guyson Corp. has integrated a machine-tending robot for automatic loading and unloading of its RXS-900 rotary spindle-blast system in an unmanned blast-finishing workcell. The company claims the component-manipulating robot and automated spindle-blast system can support a faster pace of blast treatment and higher production volume than a human operator could handle.
Based on the size and weight of the components to be processed, the end-of-arm gripper tooling, the range of motion required by the tended machine, and the layout of the cell’s external material conveying equipment, the company chose a FANUC Robotics model M-10iA robot with six axes of motion for the application.
To enable 360-degree blasting of both the top and bottom aspects of the cylindrical components, custom component-holding fixtures were designed to locate and cradle the parts in either face-up or face-down orientation. A three-jaw gripper was chosen for the robot end effector that can grasp the workpiece by the ID or OD, and an auxiliary rotary actuator with a pneumatic OD gripper is mounted on the front of the blast machine to invert the component between finishing of the first and second sides.
The six rotary spindles of the blast system are located around the perimeter of its 42-in.-dia. turntable, which is rotated between blast cycles in 60-degree steps by a cam indexer that offers positional accuracy of ±39 arcseconds.
Inside the finishing enclosure, components are exposed to the timed media blast from a prearranged group of suction guns or pressure-blast nozzles at two blasting stations as the satellite spindles are rotated at controlled and adjustable speed. The blast cabinet is provided with a separate chamber for blowoff of residual media and dust before the finished part is delivered to the front unload position.
subscribe now

The Fabricator is North America's leading magazine for the metal forming and fabricating industry. The magazine delivers the news, technical articles, and case histories that enable fabricators to do their jobs more efficiently. The Fabricator has served the industry since 1970.
start your free subscription- Stay connected from anywhere

Easily access valuable industry resources now with full access to the digital edition of The Fabricator.

Easily access valuable industry resources now with full access to the digital edition of The Welder.

Easily access valuable industry resources now with full access to the digital edition of The Tube and Pipe Journal.

Easily access valuable industry resources now with full access to the digital edition of The Fabricator en Español.
- Podcasting

In this episode of The Fabricator Podcast, Caleb Chamberlain, co-founder and CEO of OSH Cut, discusses his company’s...




